

ЁАРЅГцЛњЦїШЫЁБФмЗЩЛЙФмгЮ ПежаЕНЫЎЯТЮоЗьЙ§ЖЩ
 ВЮгыЛЅЖЏЁЁ
ВЮгыЛЅЖЏЁЁ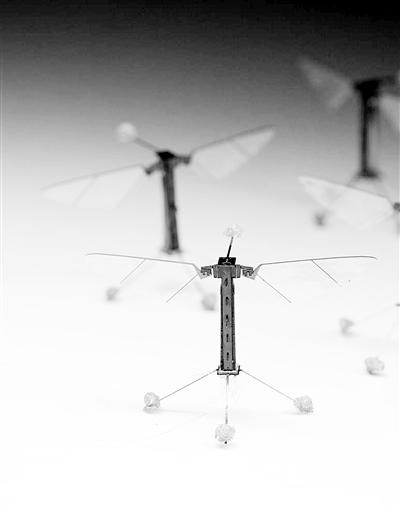
ЁЁЁЁПЦММШеБЈББОЉ10дТ25ШеЕч (МЧепЗПСеСе)1939ФъЃЌвЛУћЖэТоЫЙЙЄГЬЪІЬсГіСЫЁАЗЩааЧБЭЇЁБЕФИХФюЃЌФмДгПежаЕНЫЎЯТЪЕЯжЮоЗьЙ§ЖЩЃЌЕЋМИЪЎФъРДЃЌЯЪгаГЩЙІЕФЩшМЦЯШР§ЁЃУРЙњЙўЗ№ДѓбЇЙйЗНЭјеОзюНќГЦЃЌИУаЃЮЂаЭЛњЦїШЫЪЕбщЪвНЋЗЩааЧБЭЇЕФЩшМЦЯђЧАЭЦНјСЫвЛВНЃЌЫћУЧЩшМЦЕФЗЩааУлЗфЃЌвВОЭЪЧЁАРЅГцЛњЦїШЫЁБЃЌМШФмдкПежаЗЩЃЌвВФмдкЫЎжагЮЁЃ
ЁЁЁЁЩшМЦЗЩааЧБЭЇУцСйзХЁАЯрЛЅГхЭЛЁБЕФЬєеНЃЌЗЩааЦїашвЊНЯДѓЛњвэЬсЙЉЩ§СІЃЌЖјЫЎЯТКНааЦїашвЊМѕЩйБэУцЛ§РДНЕЕЭзшСІЁЃЙўЗ№ДѓбЇЕФЙЄГЬЪІУЧДгНЧзьКЃШИЩэЩЯевЕНЩшМЦЕФСщИаЃЌетжжЛЊРіЕФрЙФёЪЧздШЛНчзюХЃЕФЁАЛьКЯЖЏСІГЕЁБЃЌФмздгЩЕиЭљЗЕгкПежаКЭЫЎЯТЁЃ
ЁЁЁЁдкЕТЙњОйааЕФжЧФмЛњЦїШЫКЭЯЕЭГЙњМЪЛсвщЩЯЃЌЙўЗ№ДѓбЇЮЂаЭЛњЦїШЫЪЕбщЪвГТПЮФЮЊЕквЛзїепЕФЯрЙиТлЮФБЛЦРЮЊзюМббЇЩњТлЮФНБЁЃЭЈЙ§ИїжжРэТлЁЂМЦЫуКЭЪЕбщбаОПЃЌГТПЮФЕФЭХЖгЗЂЯжЃЌНЧзьКЃШИдкПеЦјжаКЭЫЎжаЕФЦЫвэЖЏСІбЇЛњжЦЗЧГЃЯрЫЦЃЌСНжжЧщПіЯТЃЌГсАђЖМЪЧЧАКѓАкЖЏЃЌЮЈвЛЕФЧјБ№ЪЧАкЖЏЫйЖШЁЃ
ЁЁЁЁбаОПЭХЖгвђДЫЩшМЦГіЪзИіМШФмЗЩЯшгжФмгЮгОЕФЛњЦїУлЗфЃЌЫќБШЧњБ№еыЛЙаЁвЛаЉЃЌЦфЮЂаЭГсАђЕФЩПЖЏЦЕТЪПЩИпДяУПУы120ДЮЁЃЕЋЫќШчДЫжЎаЁЃЌЗжСПШчДЫжЎЧсЃЌИљБОУЛАьЗЈДђЦЦЫЎУцеХСІЁЃЮЊСЫПЫЗўетИіеЯАЃЌЛњЦїУлЗфЛсвдФГИіНЧЖШаќЭЃдкЫЎУцЃЌднЪБЙиЕєв§ЧцЃЌШЛКѓГСШыЫЎРяЯТЧБЁЃ
ЁЁЁЁЫЎЕФУмЖШЪЧЛњЦїУлЗфУцСйЕФЕкЖўжиеЯАЁЃТлЮФЕкЖўзїепЗЈШ№ЖћЁЄКеЖћВЉСщНтЪЭЫЕЃЌЫЎЕФУмЖШЪЧПеЦјЕФ1000БЖЃЌШєЛњЦїУлЗфГсАђЩПЖЏЕФЦЕТЪВЛМгЕїећЃЌдђКмШнвзБЛЛйЕєЁЃЮЊДЫЃЌбаОПЭХЖгНЋетИіЦЕТЪДгУПУы120ДЮНЕжСУПУы9ДЮЃЌЕЋЭЌЪББЃГжСЫЩПЖЏЕФЖЏСІЛњжЦвдМАЯрЭЌЕФНТСДЩшМЦЁЃ
ЁЁЁЁЫфШЛетаЉЩшМЦБЃжЄСЫЛњЦїУлЗфДгПежаЕНЫЎЯТЕФЮоЗьЙ§ЖЩЃЌЕЋЗДЙ§РДЛЙВЛааЃЌвђЮЊДгЫЎжаГіРДЪБЃЌЛЙВЛФмВњЩњзуЙЛЕФЩ§СІЃЌЖјете§ЪЧбаОПЭХЖгЯТвЛВНвЊЙЅПЫЕФФбЕуЁЃ
ЁЁЁЁГТПЮФБэЪОЃЌЖдЦЫвэдЫЖЏЕФЗжЮіВЂВЛжЛОжЯогкРЅГцДѓаЁЕФЮЂаЭЗЩааЦїЃЌетИіРэТлгаЧБСІгУРДЩшМЦГіИќДѓЕФЗТЩњЛњЦїШЫЁЃ
>ЮФЛЏаТЮХОЋбЁЃК
- ЁЄРЅЧњЁЖФЕЕЄЭЄЁЗССЯрТэЖњЫћ ЖЋЮїЗНЙХРЯЮФЛЏМЄЧщХізВ
- ЁЄЬНЗУЁЖТъФЩЫЙЁЗЗЧЮяжЪЮФЛЏвХВњДЋГаШЫ ЪиЛЄУёзхжЧЛл
- ЁЄвдДЋВЅЩчЛсбЇЪгНЧЬНЫїЃКаТжаЙњХЎадаЮЯѓБфЧЈ
- ЁЄЦЏбѓЙ§КЃЕФЁАбѓУРКяЭѕЁБЃКАбОЉОчГЊИјЪРНчЬ§
- ЁЄЫЋгяЯрЩљгыжкВЛЭЌЃКЕБЯрЩљгіЩЯЁАЭсЙћШЪЁБ
- ЁЄНѕР№ЁЂЗ№ЯЕЁЂЙйаћ...ЭјТчСїаагяГЩЮФЛЏЗћКХ
- ЁЄЙЪЙЌЭЦГіЁАГѕбЉЁБЕїСЯЙо ЭјгбЃКГјЗПжБНгЩ§МЖгљЩХЗП
- ЁЄЕкЪЎШ§НьЛЦЕлЮФЛЏЙњМЪТлЬГЃКбЇепвдЪЋИшНВЪіМвЙњЧщЛГ


















