

ĺ©∂ľīů—ß’Ļ ĺ‘÷ļ¶ň—廼ķ∆ų»ň ń‹Ō÷≥°ň——į‘÷√Ů

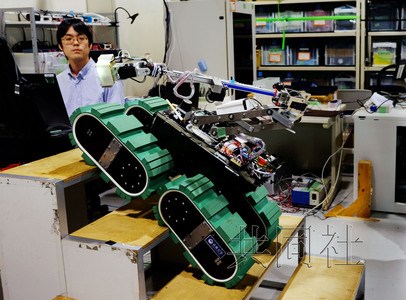
°°°°÷––¬ÕÝ6‘¬11»’ĶÁ ĺ›»’ĪĺĻ≤Õ¨…Á11»’Ī®Ķņ£¨»’Īĺĺ©∂ľīů—ßĹŐ ŕň…“įőńŅ°(Ľķ∆ų»ňĻ§—ß)ĶńŅ∆—––°◊ťĻęŅ™’Ļ ĺ‘÷ļůň—廼ķ∆ų»ň°įKOHGA3°Ī”Ž°įKAMUI°Ī°£ňŁ√«ń‹‘ŕ‘÷ļ¶Ō÷≥°ň——į–Ť“™ĺ»÷ķĶń‘÷√Ů≤Ę‘ŕĶōÕľ…ŌĪÍ ∂≥ŲņīĶ»°£
°°°°KOHGA3≥§86ņŚ√◊£¨ŅŪ45ņŚ√◊£¨łŖ75ņŚ√◊£¨÷ōīÔ40ĻęĹÔ£¨ő™“£Ņō≤Ŕ◊ų–ÕĽķ∆ų»ň£¨ņŻ”√į≤◊įŃň7łŲ¬ŪīÔĶńĽķ–ĶĪŘ«į∂ňį≤◊įĶń…„ŌŮÕ∑∂‘÷‹őßĹÝ––ň——į°£
°°°°”…”ŕŇšĪłŃňņŗň∆ŐĻŅňĶń¬ńīÝ£¨ľī Ļ‘ŕ∂ŮŃ”Ķń¬∑ŅŲŌ¬“≤ń‹–– Ľ°£∂ę»’ĪĺīůĶō’ū÷–£¨KOHGA3‘ÝĪĽ”√”ŕ∂‘”–Őģňķő£Ō’Ķń«ŗ…≠ŌōįňĽß –ŐŚ”żĻ›’ĻŅ™Ķų≤ť£¨ĺ≠ĻżŃň∑īłīłńŃľ°£
°°°°KAMUI≥§46ņŚ√◊£¨ŅŪ38ņŚ√◊£¨łŖ53ņŚ√◊£¨÷ō24ĻęĹÔ£¨ő™◊‘÷ų–ÕĽķ∆ų»ň£¨Õ®Ļż≤‚ĺŗł–÷™∆ųņīĽś÷∆ĶōÕľ£¨”…ńŕ÷√Ķńł–ő¬∆ųņī∑ĘŌ÷‘÷√Ů°£
°°°°—› 弊…Ō£¨ŃĹŐ®Ľķ∆ų»ň‘≤¬ķÕÍ≥…Ńň’Ōį≠‘Ĺ“į°Ę∑ĘŌ÷īķĪŪ‘÷√ŮĶńĪÍ ∂Ķń»őőŮ°£
°°°°2014ńÍ5‘¬£¨–¬ĚēĻ§Ņ∆īů—ß(őĽ”ŕ–¬ĚēŌōįō∆ť –)ĺŔįžĶńň—廼ķ∆ų»ňľľń‹ĺļ»ŁīůĽŠ…Ō£¨ň…“į–°◊ť∆ĺĹŤ’‚ŃĹŐ®Ľķ∆ų»ňĽŮĶ√Ńň”Ň §°£ň…“įĪŪ ĺ£ļ°į“™ľŐ–Ý Ķ ©łńŃľ£¨Ō£ÕŻ‘ŕ‘÷ļ¶Ō÷≥°“≤ń‹Ķ√ĶĹĽÓ”√°£°Ī
>Ļķľ –¬őŇĺę—°£ļ
- °§Õ‚√Ĺ£ļįÕĽýňĻŐĻ◊‹ņŪįžĻę “īů¬•∆ūĽū ¬Ļ ‘≠“Úőī√ų
- °§ļęĻķĹ≠‘≠Ķņ…ĹĽū ‹‘÷…ÍĪ® Īľš—”≥§ Ķų≤ťĻśń£ņ©īů
- °§∂Ū Į”ÕĻęňĺĻ§≥߼ū«ť“—Ķ√ĶĹŅō÷∆ őī‘ž≥…»ň‘Ī…ňÕŲ
- °§őń‘ŕ“ķő™–¬ńŕłů≥§ĻŔįš∑ĘőĮ»ő◊ī ļę‘ŕ“įĶ≥«ŅŃ“ŅĻ“ť
- °§ ĪłŰ9ńÍ£¨»’Īĺ…Õ”£įÕ Ņ‘Ŕ Ľ»Žł£ĶļłŰņŽ«Ý”£Ľ®īůĶņ
- °§ļęĹÝľĮÕŇĽŠ≥§’‘ŃŃłš“Ú≤°»• ņ ļę∑®‘ļń‚≤ĶĽōĻęňŖ
- °§»’ĪĺĻ¨∆ťŌō°įŐę—ŰĶį°Ī√ĘĻŻ ŃĹłŲŇń≥Ų50ÕÚ»’‘™
- °§ņķ Ī3ńÍŅÁ‘Ĺ33Ļķ ļ…ņľń–◊”ÕÍ≥…ĶÁ∂Į≥ĶĽ∑«Ú÷ģ¬√




















